ESP32を用いてサーボモータを実装したので、そのやり方について紹介したいと思います。
この記事を読むことで、人気のWifi, Bluetooth搭載マイコン、ESP32でサーボモータが動かせるようになります。
動かしている動画が以下のものです。
サーボモータを動かせることで、ロボット、IoT、DIYなど幅広い分野を自作できるようになり、趣味でも業務でも自由度が広がること間違いなしです!
Arduino Nano版はこちら
ESP32, サーボモータの簡単な説明
ESP32
ESP32の大きな特徴はWifi, Bluetoothを搭載しているところです。そのうえでArduinoよりも安価に購入でき、ArduinoコードやC++などいくつかの言語の互換性があります。そのため、1つのマイコンでいろいろなことを試したい方には大変おすすめなマイコンです。
サーボモータ
これがあることでロボットアームなど、角度を指定する必要があるロボットを作ることができるようになります。また、その他のデバイスに対しても、角度を指定して動かせるようになり、移動ロボットとの組み合わせでも有効的に使うことができるようになります。
実験構成
- ESP32
- サーボモータ (SG90)
- ジャンパ線多数
ESP32、サーボモータは上記のものを使用しています。
ジャンパ線は何を使用してもいいですが、一応リンクを張っておきます。(メスメスのみで配線可能です)
実験
ESP32のセットアップや自動書き込み機能の実装に関してはこちらの記事を参考にしてください。
配線
まず配線は以下のようにします。
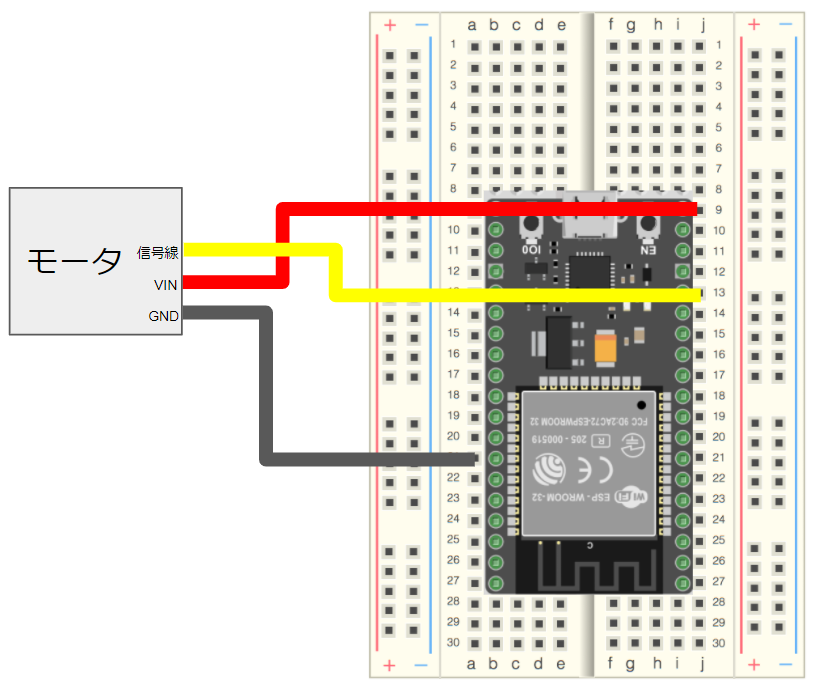
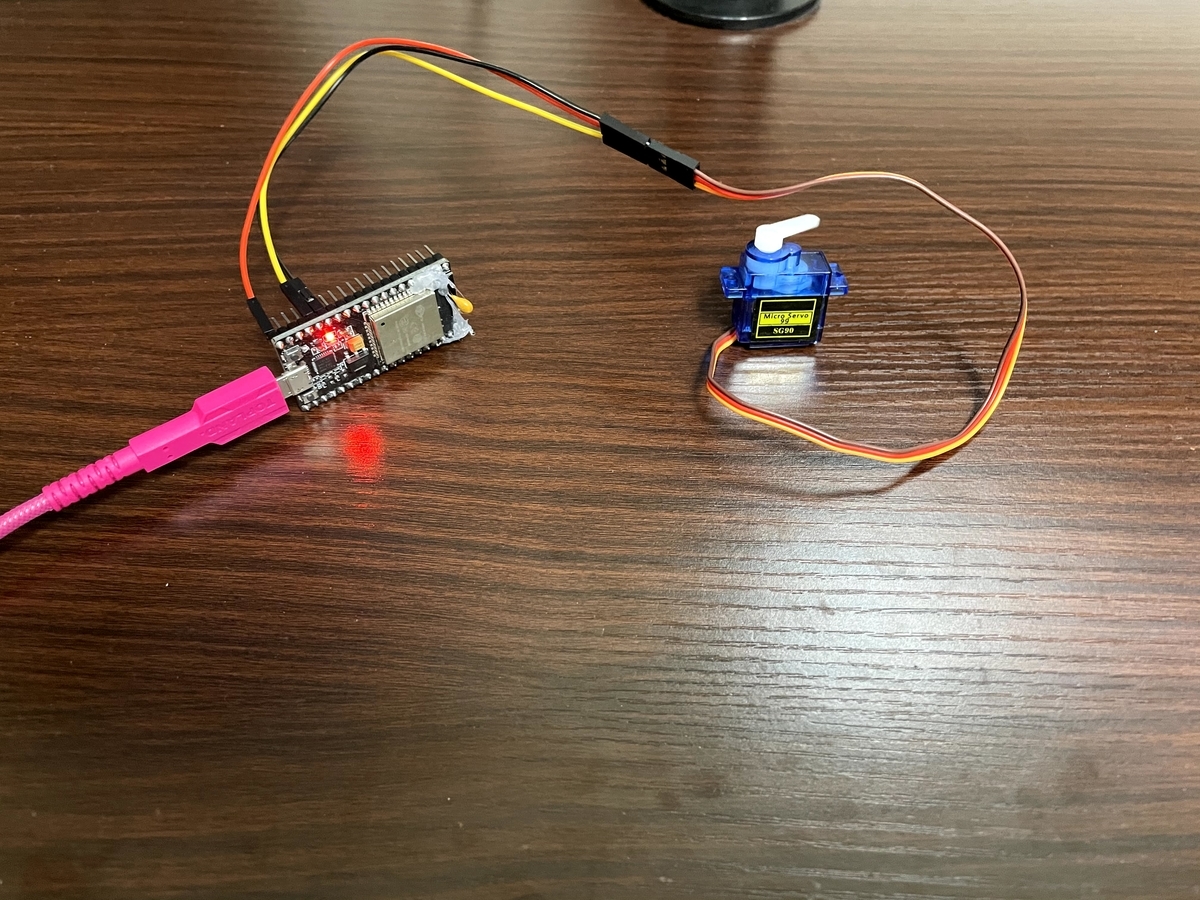
配線ができると以下のような画像のようになります。
実行コード
ここまで出来たら以下のコードを実行することで動作確認ができます。
上記のソースコードでは、モータを正負方向に180度繰り返し動かすプログラムを実装しています。実際には、これを用いて、ロボットの制御をしたり、IoT機器の制御をしたりします。
まとめ
今回は、ESP32でサーボモータを動かすために必要なものの紹介と、サンプルプログラムの紹介をしました。