ESP32を用いて皮膚電位センサを実装したので、そのやり方について紹介したいと思います。
この記事を読むことで、話題のマイコンであるESP32で皮膚電位センサが実装できるようになります。
生体センサはロボット開発にはあまり有用性はないかもしれませんが、以前実装した環境センサと組み合わせることでIoTとしてはかなり重要な役割を果たすと思います。今回の皮膚電位センサは発汗の観測などができるため、うそ発見器に使われることが多いようです。
Youtube
Arduino Nano版はこちら
ESP32, cjmcu-6701の簡単な説明
ESP32
ESP32の大きな特徴はWifi, Bluetoothを搭載しているところです。そのうえでArduinoよりも安価に購入でき、ArduinoコードやC++などいくつかの言語の互換性があります。そのため、1つのマイコンでいろいろなことを試したい方には大変おすすめなマイコンです。
皮膚電位センサ (cjmcu-6701)
皮膚電位センサは皮膚の抵抗を測ることで発汗時とそうでないときの差異を出すことできます。生体情報のセンシングはかなり難しく、このセンサ単体で出来ることは限られています。なので、これに加えて環境センサやほかの生体センサを使うことを強くお勧めします。
実験構成
- ESP32
- 皮膚電位センサ (cjmcu-6701)
- ジャンパ線多数
ESP32、皮膚電位センサは上記のものを使用しています。
ジャンパ線は何を使用してもいいですが、一応リンクを張っておきます。
実験
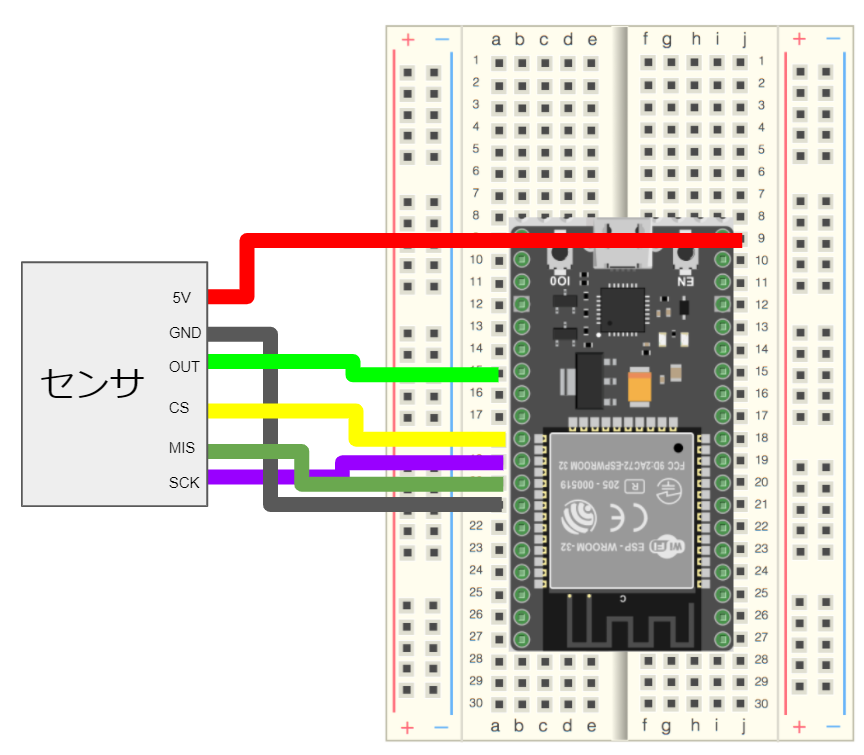
配線
まず配線は以下のようにします。
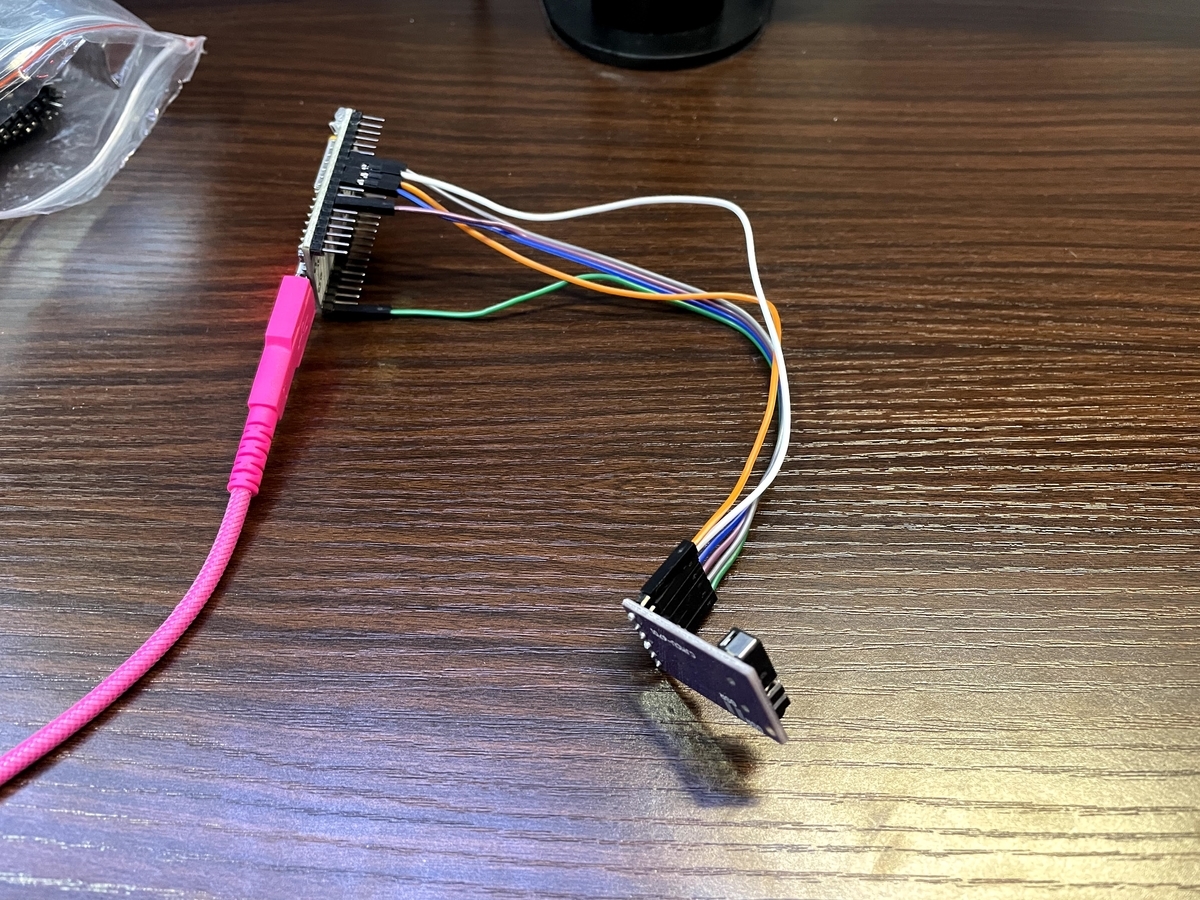
配線ができると以下のような画像のようになります。
実行コード
ここまで出来たら以下のコードを実行することで動作確認ができます。
今回は皮膚電位センサの数値をシリアルモニタで確認できるようにしています。
動画にもあるようにウェットティッシュで手を湿らせると数値が上がります。発汗時も同様の挙動をするのでしょう。
これらの値とほかのセンサを組み合わせることで、いろんなIoT機器を製作できるようになります。
まとめ
今回は、ESP32で皮膚電位センサを動かすために必要なものの紹介と、サンプルプログラムの紹介をしました。